이 기체는 6 TOPS의 속도의 NPU를 장착하고 있어서 인공지능 기능이 가능합니다.
가령 stereo camera로부터 추출해 내는 3D Depth와 YOLOv8이 가능합니다.
'M.A.R. (Machine of Attack & Return)' 카테고리의 다른 글
| 전체 계획의 간략한 도면 (0) | 2023.10.03 |
|---|
이 기체는 6 TOPS의 속도의 NPU를 장착하고 있어서 인공지능 기능이 가능합니다.
가령 stereo camera로부터 추출해 내는 3D Depth와 YOLOv8이 가능합니다.
| 전체 계획의 간략한 도면 (0) | 2023.10.03 |
|---|
만들다 보니 지금 드론 자체의 무게만 해도 330g 짜리 배터리까지 합치면 거의 1kg이 넘어간다.
어쩌면 아마도 지금 달아놓은 모터로는 뜨지도 못할 가능성까지 있다.
거기에 지금 필요하다고 생각되는 Payload를 2.5kg으로 추가로 잡는다면 드론 모터부터 바꿔야 할 지 모른다.
그래서 모터 찾는 방법들을 찾아보았다.
넉넉잡고 드론까지 합쳐서 4kg의 Load를 날릴 수 있는 모터를 찾아야겠다.
https://robu.in/selecting-quadcopter-motor-a-detailed-guide-2021/
https://www.alibaba.com/product-detail/MOTORS-big-thrust-brushless-drone-OEM_1600799748053.html
Motors Big Thrust Brushless Drone Oem T-motor Aircraft 10kg Payload Motor - Buy Buy 24v Dc Motor,Oem T-motor,Brushless Dc Motor
Motors Big Thrust Brushless Drone Oem T-motor Aircraft 10kg Payload Motor , Find Complete Details about Motors Big Thrust Brushless Drone Oem T-motor Aircraft 10kg Payload Motor,Buy 24v Dc Motor,Oem T-motor,Brushless Dc Motor Price 10 Volt Medical Bldc Dc
www.alibaba.com
https://www.aliexpress.us/item/3256805045951351.html?gatewayAdapt=glo2usa&spm=a2g0o.order_list.order_list_main.5.14af1802RRDMP2
www.aliexpress.us
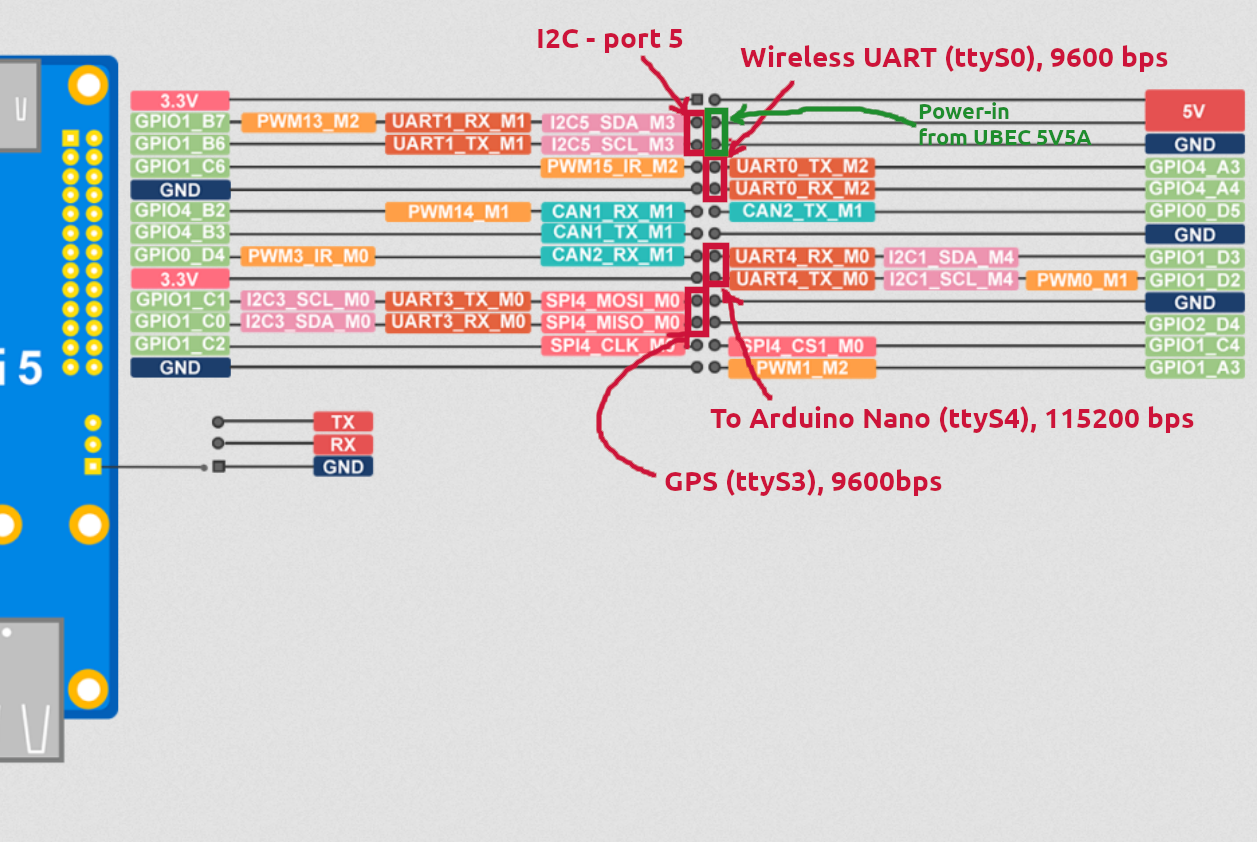
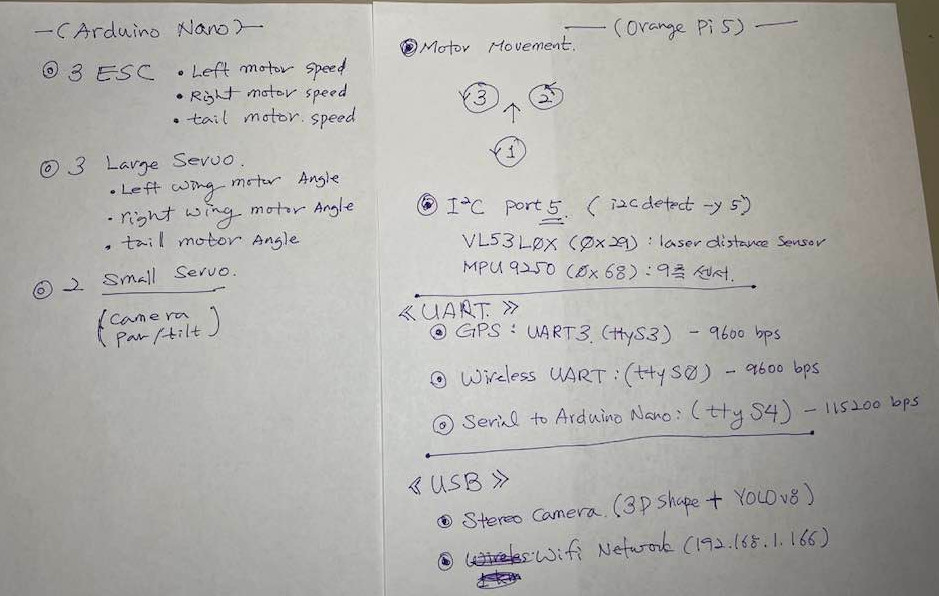
Orange Pi 5에서 모터와 기타 단순 관리용 서브모듈로 사용하는 Arduino Nano와의 시리얼 통신용 코드.
이 방식은 아래와 같이 형태의 4글자 명령어와 최대 4개의 파라메터를 함께 보낼 수 있는 방식이다. 기체의 두뇌인 Orange Pi 5에서 온갖 명령어를 보내서 단순 작업들을 아두이노 나노에게 실행시키는 방법이다.
<ESPC:3,4,-29334,4>
<ESCT:0>
Parses.h
#define BUFFER_SIZE 50
int P2B_NEWLINE = 11; // < -- Beginning of Command to Remote Control that controls R/C Car
int P2B_COM_TYPE = 12; // 0..9 -- First 2 letters following "<"
// Total Command Types : 10 x 10 = 100
int P2B_DATA = 12; // Data section
int P2B_ENDING = 13; // > -- End of Message Signal
int P2B_STAT_NONE = 1; // Do nothing until '<' has received
int P2B_STAT_CMD = 2; // Accepting Command
int P2B_STAT_DATA = 3; // Accepting Command data
int P2B_STAT_END = 4; // '>' has receieve, it is the end of command;
// PI to Nano command string
char p2b_command[5];
char p2b_data[BUFFER_SIZE];
int p2b_paramcount = 0;
int p2b_status = 0;
int i = 0; // dumb int
int j = 0; // dumb int
int k = 0; // dumb int
int n = 0; // dumb int
int lp =0; // dumb last position of input command string
int r = 0; // Simple Counter to replace delay() in the main loop
String s; // Temporary string for general purpose
String rs;
String cmd; // used on ExecuteLogicalCommand()
boolean debugSerial = true;
boolean ContionousMove = true;
char inputString[200]; // a string to hold incoming data
boolean stringComplete = false; // whether the string is complete
char inChar;
String tempStr;
char buffer[12]; // buffer used for itoa (int to string conversion)
int inlen = 0; // Length of inputString
char RemoteString[50];
// value from PC Command (integer params 1 .. 4 max)
int paramcount = 0; // How many params in input String
int param1 = -1; // value from PC Command (Param 1)
int param2 = -1; // value from PC Command (Param 2)
int param3 = -1; // value from PC Command (Param 3)
int param4 = -1; // value from PC Command (Param 4)
int tempVal = 0;
int nPos = 0;
int sign = 1; // 1 = plus, -1 = minus
float fparam1 = 0.0;
float fparam2 = 0.0;
float fparam3 = 0.0;
float fparam4 = 0.0;
boolean SecondParam = false; // Now gettign second parameter (after ,)
// NEW PINS 18 = cam
const int CAMPin = 5;// the number of the LED pin
int freq = 5000;
int resolution = 8;
int dist = 0;
int StartingSpeed = 0; // 0 - 255 (8 bit)
int targetHeight = 0;
int msAi = 0;
int msBi = 0;
int msCi = 0;
int msDi = 0;
int maxSpeed = 50;
int height = 0;
int targetLR = 0; // Target Left/Right
int targetFB = 0; // Target Forward / Backward
int targetTN = 0; // Target Turn (+ CW, - CCW)
boolean mStop = false; // MS, Stop Motors
boolean mGoInAngle = false; // MG, Set Motor Speeds and Directions
boolean contGetAll = false; //
boolean AutoBalancing = false;
boolean NoOffset = false;
////////////////////////////////////////////////////////////////
void ClearCommand() {
p2b_command[0] = 0; // null
for (int i=0; i <= 49; i++){
p2b_data[i] = 0; // null
}
// set as none, 0 could be value
param1 = -1; //
param2 = -1; //
param3 = -1; //
param4 = -1; //
SecondParam = false;
}
void ClearRemoteString() {
for (i=0;i<=49;i++) {
RemoteString[i] = 0;
};
}
void ClearParamsAndInputstring(){
// clear the string:
for (i=0;i<=49;i++) {
inputString[i] = 0;
};
i = 0;
j = 0;
paramcount = 0; // How many params in input String
param1 = -1;
param2 = -1;
param3 = -1;
param4 = -1;
fparam1 = 0.0;
fparam2 = 0.0;
fparam3 = 0.0;
fparam4 = 0.0;
stringComplete = false;
}
MAR01AR.ino
/* This is written by Henry Kim, as a M.A.R. (Machine of Attack & Return)
Currently testing level @ Oct. 1, 2023
3 ESC for Propellers
- Center Tail Propeller
- Left Wing Propeller
- Right Wing Propeller
3 Servo 메인 모터 180도 회전
- for 180 degree rotation of 3 Propeller Motors
10 LED
1 A/D Battery Level Monitor
1 A/D Light Sensor
3 A/D Sound Sensor
1 A/D Temperature Sensor
*/
#include <Servo.h>
#include "Parses.h"
// ---------------------------------------------------------------------------
// Customize here pulse lengths as needed
#define MIN_PULSE_LENGTH 1000 // Minimum pulse length in µs (1 ms : min speed)
#define MAX_PULSE_LENGTH 2000 // Maximum pulse length in µs (2 ms : max speed)
// ---------------------------------------------------------------------------
Servo escLeft1, escRight2, escCenter3;
Servo motLeft4, motRight5, motCenter6;
// ---------------------------------------------------------------------------
void setup() {
ClearCommand();
Serial.begin(115200);
Serial.println("#MAR-NANO>");
// 3 main ESC for Props
escLeft1.attach(4, MIN_PULSE_LENGTH, MAX_PULSE_LENGTH);
escRight2.attach(5, MIN_PULSE_LENGTH, MAX_PULSE_LENGTH);
escCenter3.attach(6, MIN_PULSE_LENGTH, MAX_PULSE_LENGTH);
// Servos - Change angles of Prop motors
motLeft4.attach(7);
motRight5.attach(8);
motCenter6.attach(9);
// Prevent motor run at the start
stopAllProps(); // set in MIN_PULSE_LENGTH
// Servos heading top initially
basePosition4Servos(); // Heading Top
}
void loop() {
r++; //
if (r > 300000) { r = 0; } // Reset r if it is too large
if ((r % 20000) == 0) { // Do some sensor reading
//
}
while (Serial.available()) {
inChar = (char)Serial.read();
// get the new byte:
//Serial.print(inChar); // for debut
// add it to the inputString:
inputString[i] = inChar;
i++;
// if the incoming character is a newline, set a flag
if (inChar == '<') {
p2b_status = P2B_STAT_CMD;
ClearCommand();
j = i-1;
} else if (inChar == '>') { // so the main loop can do something about it:
p2b_command[0] = inputString[j+1]; // Get Command Character
p2b_command[1] = inputString[j+2]; // Get Command Character
p2b_command[2] = inputString[j+3]; // Get Command Character
p2b_command[3] = inputString[j+4]; // Get Command Character
// O : Orientation
// D : Distance
p2b_paramcount = int(inputString[j+6])-48; // take out 0
j = j + 8; // now j is pointing param starting position
if (p2b_paramcount > 0) {
tempVal = 0;
nPos = 0;
sign = 1; // 1 = plus, -1 = minus
k = 1;
for (n=j;n<=lp+1;n++){
// end of param
if ((inputString[n] == ',') or (inputString[n] == '>')){
if (k == 1){
param1 = tempVal * sign;
}
if (k == 2){
param2 = tempVal * sign;
}
if (k == 3){
param3 = tempVal * sign;
}
if (k == 4){
param4 = tempVal * sign;
}
tempVal = 0;
k++; // Param No.
nPos = 0;
sign = 1; // 1 = plus, -1 = minus
} else {
if (inputString[n] == '-'){
sign = -1;
} else {
nPos++;
if (nPos == 1) {
tempVal = (byte(inputString[n]) - 48);
} else {
tempVal = tempVal * 10 + (byte(inputString[n]) - 48);
}
}
}
}
} // end of if command is for this Machine
Serial.println("ESCT TEST 00");
ExecuteLogicalCommand();
i = 100; // refresh counter
stringComplete = true;
p2b_status = P2B_STAT_NONE;
} else {
lp = i-1; // set last position on each entry;
}
} /* while (Serial.available()) { */
if (stringComplete) {
uPrint(); // Return for debug
ClearParamsAndInputstring();
}
}
void ExecuteLogicalCommand() {
cmd = (char)p2b_command[0]+(char)p2b_command[1]+(char)p2b_command[2]+(char)p2b_command[3];
if (cmd == "ESCT"){ // Test ESC for Prop Motors
testESC();
};
if (cmd == "SRVT"){ // Test All Servos
testServos();
}
}
void basePosition4Servos(){
// Servos heading top initially
motLeft4.write(180); // Heading Top
motRight5.write(180); // Heading Top
motCenter6.write(180); // Heading Top
}
void testServos() // 3 Servos : escLeft1, escRight2, escCenter3
{
// Heading top to bottom
for (int i = 0; i <= 180; i += 10) {
motLeft4.write(180-i);
motRight5.write(180-i);
motCenter6.write(180-i);
delay(100);
// Heading bottom to top
for (int i = 0; i <= 180; i += 10) {
motLeft4.write(i);
motRight5.write(i);
motCenter6.write(i);
delay(100);
}
basePosition4Servos();
}
void stopAllProps() {
escLeft1.writeMicroseconds(MIN_PULSE_LENGTH);
escRight2.writeMicroseconds(MIN_PULSE_LENGTH);
escCenter3.writeMicroseconds(MIN_PULSE_LENGTH);
}
void testESC() // 3 ESC Test : escLeft1, escRight2, escCenter3
{
for (int i = MIN_PULSE_LENGTH; i <= MAX_PULSE_LENGTH-700; i += 40) {
// Serial.print("Pulse length = ");
// Serial.println(i);
escLeft1.writeMicroseconds(i);
escRight2.writeMicroseconds(i);
escCenter3.writeMicroseconds(i);
delay(200);
}
stopAllProps();
}
초벌. 만들어 가면서 계속 수정 중임.

=========================

===================================================
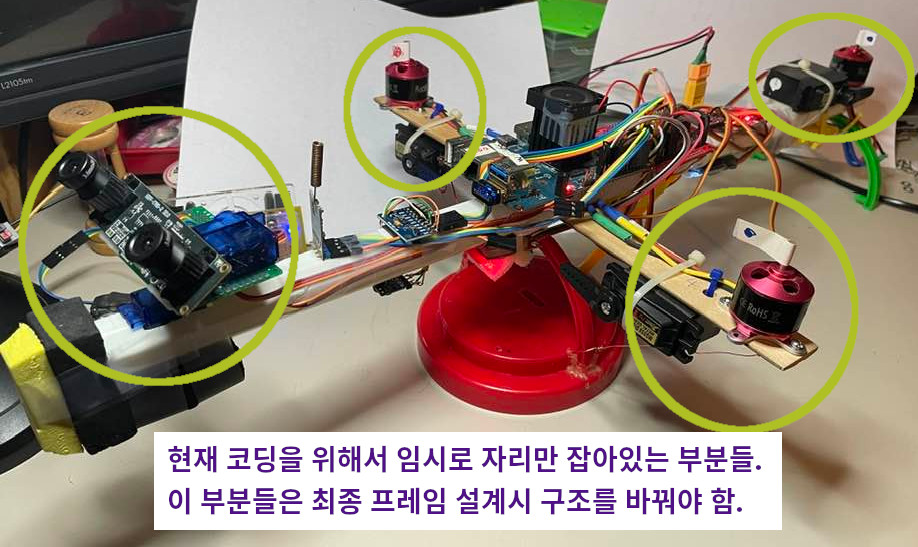
현재 기초 기능 코딩용 기체.
(날개도 180도 움직이지 않는 고정형, 날개를 움직이는 서보는 그냥 따로 옆에 붙여서 컨트롤 실험만 한 후에 나중에 최종 프레임을 디자인 할 계획임.)


| M.A.R.이 일반 R/C 드론과 치명적으로 다른 점. (0) | 2023.10.09 |
|---|