2. For now, you cannot use SSH log-in. So, attach monitor, keyboard, mouse.
3. After login,
sudo passwd root
(enter default password "odroid" for sudo)
(for new password, "111" and confirm) - enter extremely easy password. Save yourself from password hell.
sudo passwd odroid
(same thing. change all password to "111")
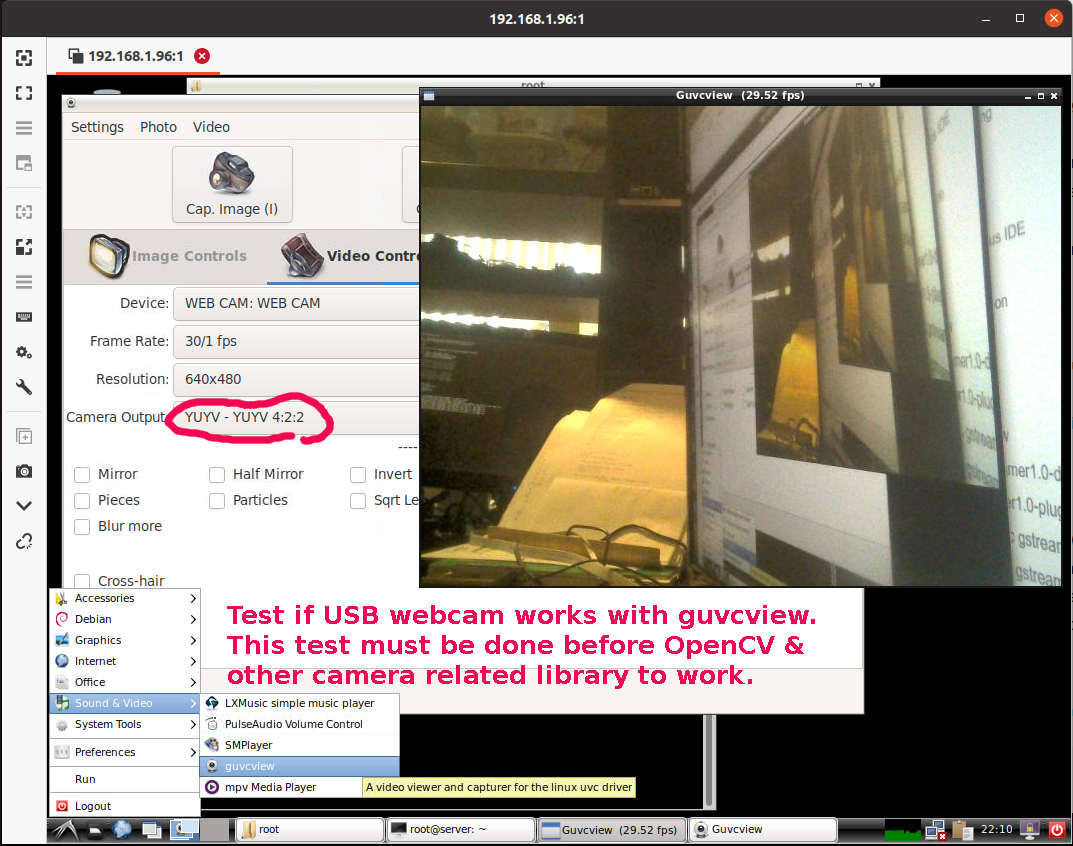
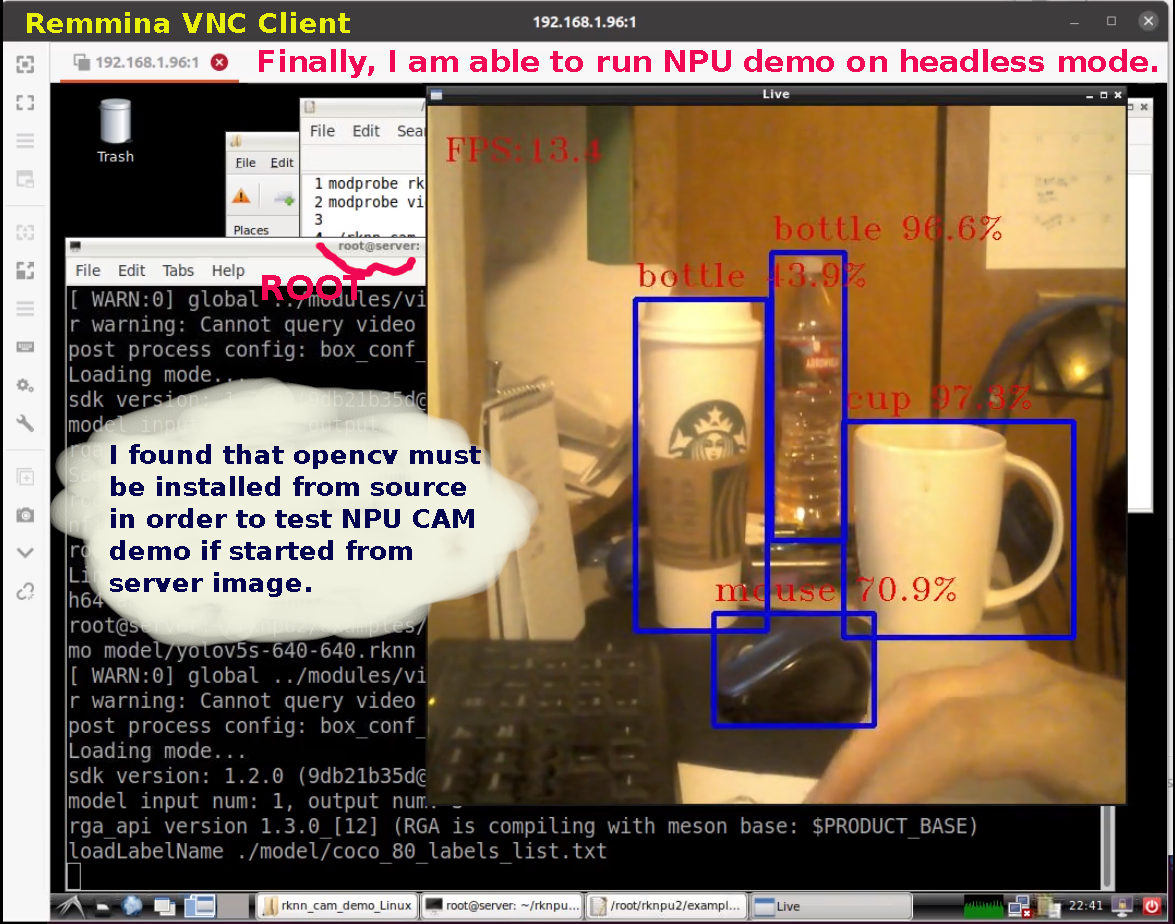
// This steps are needed for NPU to work
sudo apt update
sudo apt upgrade
sudo apt-get install nano
sudo nano /etc/ssh/sshd_config
// Allow enable SSH login option, so "root" can be remotely log-in
# Authentication:
#LoginGraceTime 2m
PermitRootLogin yes (<== change right here)
#StrictModes yes
#MaxAuthTries 6
#MaxSessions 10
sudo reboot
// After reboot, make sure to log-in as root via SSH.
// The user id "odroid" will not be used anymore.
// ************ IP RESERVATION with Router *************
// Try to reserve IP address for Odroid-M1 on your home or office router's configuration.
// If this device's MAC address is reserved with fixed local IP address, then this device will always have
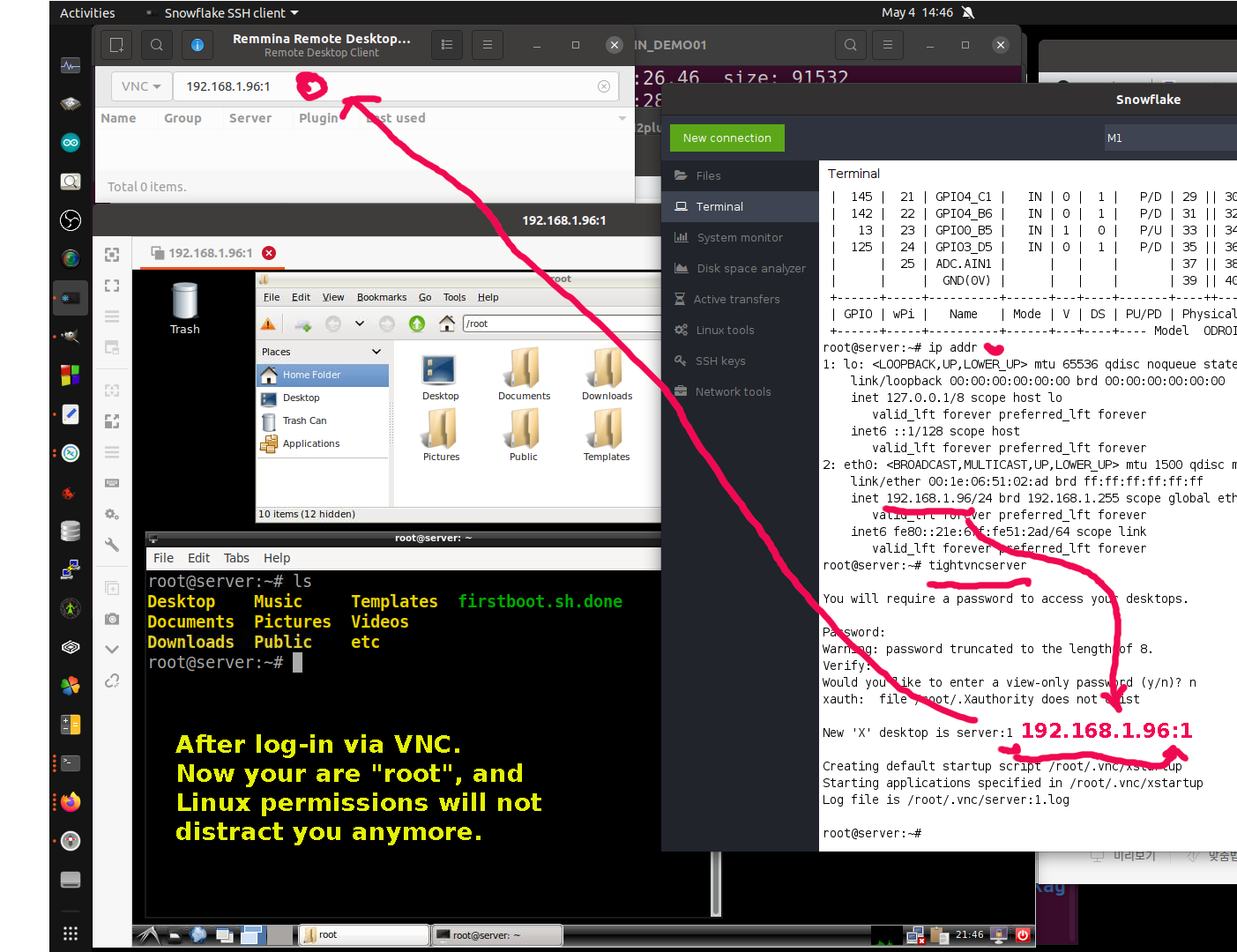
// same local IP address everytime it boot-up. In my case, I have set its IP to 192.168.1.96
// now log-in from PC using SSH as root, 111 (My case, I use Snowflake on Ubuntu. With Snowflake, you can have file manager between PC & bot, text editor that can edit files on bot from PC, and endless number of terminals.)
// Install LXDE
apt-get install lxde
- during setting, it will as for gdm or lightdm, choose lightdm.